Crossbows, a "moonshot" project for FRC robotics
As I talk about on my page regarding my involvement with FISRT Robotics, I participated in the program for a while and have worked on a lot of innovative, out of the box designs. In my last year with FIRST, 2015, I mentored team 1114 known around the FIRST community as consistently one of the best teams in the world. That year, we were far and away the top team out of 4000+ teams throughout district competitions, boasting scores greater than anyone else could worldwide.
The game had one main objective, collect boxes and stack them into towers up to 6 boxes high. Significant bonus points were awarded if one of a limited supply of green garbage bins were placed on-top of the stacks, these bonus points were essential for winning at the world championship level and this leads to the video above. Each team of 3 robots had 3 garbage cans to themselves and 4 that they could "grab" from a neutral central area. Once these central cans were pulled onto a side, they had to remain on that side. This led to the development of the fastest "can grabber" mechanisms possible as you can see by watching the video compilation from the world championship finals matches.
Almost all existing can grabbing designs used an arm or pair of arms that would pivot down to intercept the can (either the center hole or handle). While we had a competitive design that worked like this, we wanted something better. Without going into too many unnecessary details, the goal was to make a mechanism that could be given to, and outfitted on our worst alliance partner. This mechanism's sole purpose, and ultimately the sole purpose of our third alliance partner, would be to hit all 4 cans at once and prevent all of them from being taken by the other team. Further, even if only one of the 4 was pulled out of the way far enough to be used, as long as the other team had none, we would guarantee a win.
As more of a moonshot project, fewer students were involved with this project to keep the rest of the team focused on our primary strategy, only a couple other students and I set out on this challenge throughout development eventually enlisting an army when it became clear that the strategy could work.
Unfortunately, heavy time restrictions as well as my need to take even a small amount time off to study for university final exams meant that we were behind schedule going into world championships. We knew however that the crossbows would only be used if we made it to the championship finals where 600+ teams filtered down to 24 (8 alliances). This gave us about 20 hours of time to work before needing everything done and ready. Unfortunately again, despite all of our effort, we needed about 1-2 hours of extra time to further test the integration of all systems, properly time the shooting and winching, and look over all of the integration that was hastily done. This meant that although we were ready to deploy on the field, we did not feel confident enough to do so and our alliance ended up losing in the world championship semi-finals finishing 3rd in the world.
One of our crossbow integration tests ~30 minutes before potentially going on the field, winches were not activated.
The Design
As the name suggests, through a series of brainstorming and rule checking, we considered the concept of designing a mechanism to shoot a grappling hook at the can. It was clear that a projectile would require less energy to reach the can than a swinging arm. The best arms had a moment of inertia of around 0.25 kg. m^2 and followed an arc trajectory, we figured we could design a projectile that weighed less than 0.2 kg flying a shorter distance.
After thinking up the idea, I took about 20 minutes to whip up a prototype to see if shooting a weighted piece of plastic could hit the center with any kind of consistency. To our surprise it was extremely consistent. The video below shows one of the first shots.
Through countless more high speed videos, we analyzed the trajectories and flight patterns of different configurations of grappling hook designs; some would twist mid flight, some were not stable enough during flight, and some ricocheted out of the center, but we eventually settled on a design.
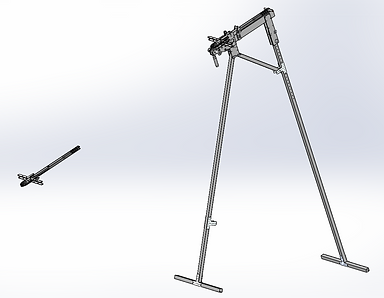
As mentioned before, the plan was to have a mechanism interact with all 4 cans, to achieve this, 4 crossbows were used. Each crossbow stood on their own tripod frame and were independently lined up with the can. The height/angle of the shot was set by the design of the legs as the mechanism could be lined up using filed markings on the ground. From our testing, the vertical lineup of the shot had a pretty low necessary tolerance making lineup easier. Horizontal lineup was harder, but using a couple sticks as sight lines seemed to work consistently enough.
At the top of each tripod was the main crossbow mechanism divided into the bolt and the firing mechanism. The bolt (projectile) was designed to be almost entirely plastic for its lower weight, higher elasticity and safer perception. The design featured a fair bit of polycarbonate, some delrin, nylon, and 3D printed ABS, it weighed about 210g.
As the bolt entered the lid of the can, the polycarbonate slider hit the top surface of the can and would slide down the body of the bolt as the rest continued deeper into the can. The sliding wing would then hit a hardstop preventing the entire bolt from falling into the can. As the wing slid back, it allowed the Delrin barbs to open (sprung open). The picture to the right shows this configuration. Each bolt would then immediately be winched in with a ratchet to prevent back-driving if contested.
Finally, Inside each bolt was a micro pneumatic piston which allowed the bolt to release from the can. As the barbs open, they hit an aluminum blade which acts as a hard stop, when the blade slid back and out of the way by the piston, the barbs flip fully 180 degrees around allowing removal from the can.
Moving onto the firing mechanism, the bolt was subjected to approximately 440N (100 lbs) of surgical tubing at 12 inches of stroke away and an estimated 130N (30 lbs) of force at the end of its 12 inch stroke. To release the bolt, I designed a tuneable hairpin trigger which was activated by the last 1/8 inch stroke of an 8W electric solenoid (a lot of design decisions were centered around rule compliance) and it worked the same way some crossbow triggers work. A rotating toggle held the bolt back while a pivoting arm with a bearing on the end to reduce friction held the toggle from rotating. The pivoting arm was 1-3 degrees over center (tuneable with a set screw) allowing a very small input force to release the trigger.
For safety, on the front of the firing mech was a pneumatic piston which was sprung up just after firing the trigger in the event that a trigger failed to fire, preventing a misfire later on in the match. For loading and when not in use, there was a quick release pin which passed through both the main frame plates of the mechanism and a hole in the of the projectile. This isolated the surgical tubing spring from the heavy front end of the bolt stopping any chance of firing the mechanism. Lastly, we were required to add a doubled up safety line from the bolt to the firing mechanism. This meant that in all, each bolt had 2 nylon strings and a pneumatic tube running back to each tripod and a winch back to the central robot. Surprisingly, accuracy was not affected.




Related Project Links

This page outlines only my most recent 3 year's involvement with the First Robotics Competition (FRC). In my last two years, I mentored a world renowned team (1114) and made it to the world finals both years in a pool of 4000+ teams worldwide.
There are no items in this list